삽질 1
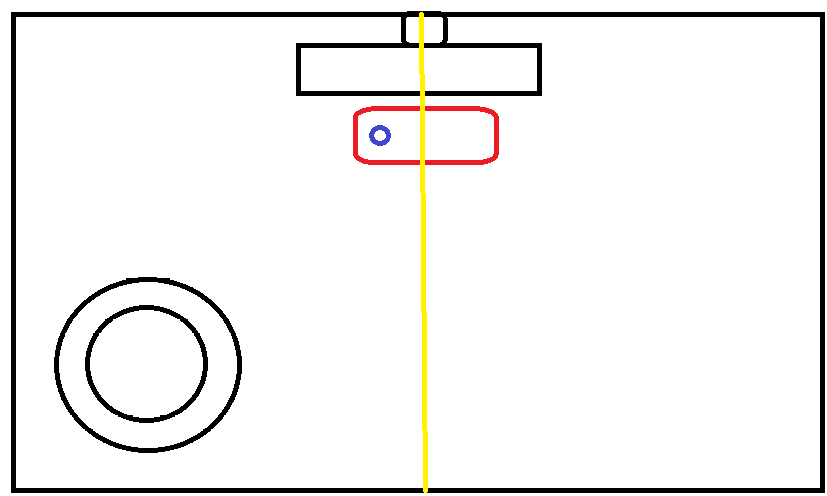
핸드폰을 룸미러 아래 정 중앙에 맞춘다 ?
그러면 카메라 의 위치가 파란색 원 이기 때문에 실제 화면은
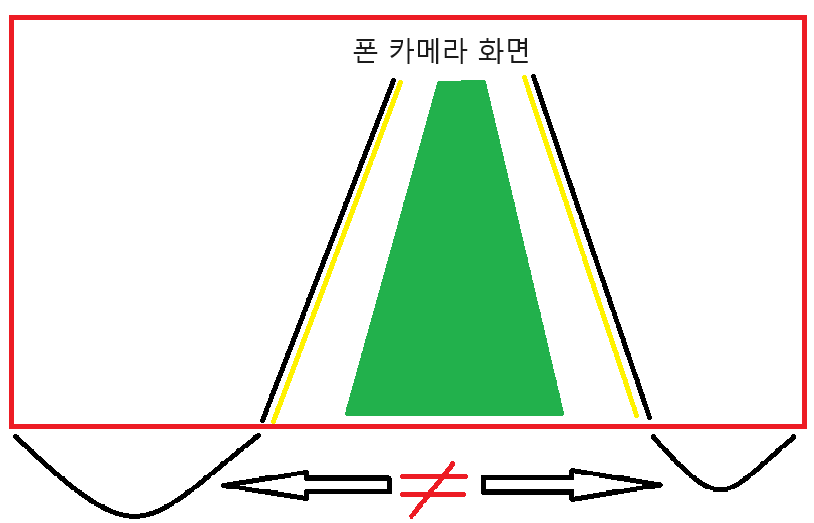
이런식으로 왼쪽에 쏠리게 돼있다.
자체 기능에 카메라를 보정을 하여 중앙을 맞추긴 하나 안정적이지 않다는 생각
해결방안.
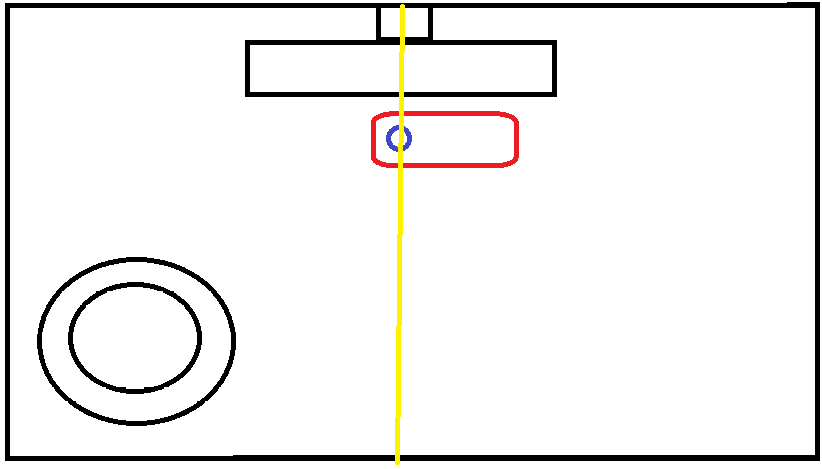
카메라를 정 중앙에 맞춘 후
lane_planner.py
파일에서 기존 CAMERA_OFFSET = -0.06 을
CAMERA_OFFSET = 0.00 으로 변경 후 해결
삽질 2
트랙스 크로스오버 차량이 등록이 되어있지 않기 때문에 새로 추가를 한다 ?
먼저 기능대로 잘 동작하기 위해 등록을하려면 fingerprint라는 것을 추가를 해야 하지만
기존에 지원차량인 트레일 블레이저에 제원만 덮어쓰고 실험해봄 - 캔통신이 모두 동일하기에 이대로 써도 문제가 없음
interface.py 파일을 내려 보면
elif candidate == CAR.TRAILBLAZER:
ret.mass = 1365. + STD_CARGO_KG
ret.wheelbase = 2.7
ret.steerRatio = 16.8
ret.centerToFront = ret.wheelbase * 0.4
tire_stiffness_factor = 1.0
ret.steerActuatorDelay = 0.2
이렇게 트블이 등록되어 있는데 mass에 트랙스 무게, wheelbase에 트랙스 휠 베이스를 입력함으로써 해결.
삽질 3
거치와 쿨러를 어떻게하지 ?
차량 특성 상 거치를 하게 되면 흔들림이 많아 고정적인 위치를 찾기가 어려움 + 일반 쿨러를 사용해도 온도가 쉽게 내려가지 않아 여러 후기를 보면 여분 선풍기로 바람을 더 쐐어 발열을 해소를함.
최근 폰 전용 쿨러가 많이 좋아졌습니다.
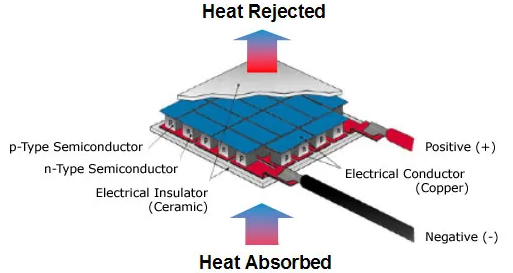
이 펠티어 소자라는 놈 때문인데요 낮은 전력으로 한쪽은 차갑게 한쪽은 뜨겁게 한다는 것만 아시면 됩니다.
전력에 따라 성에가 끼는 모델도 있습니다.
첫 제품

조이트론 듀얼 아이스 라는 제품입니다. 전력은 5w입니다.
마운트에 거치를 할 수 있는 1/4 암 나사가 적용 되어있어 고프로 마운트를 사용할 수 있는데요
고프로 마운트에 끝까지 돌렸는데 웬걸 저 암 나사가 힘을 못버티고 튀어 나와버렸습니다.
그리고 잡아주는 부분 또한 힘이 애매해서 폰이 자꾸 위 아래로 흔들렸습니다. 발열해소 부분에선 만족 했으나 거치가 불만족 스럽기에 알리 제품을 이용하기로 했습니다.
쿨링성능 보통, 소음 불만족, led 불만족, 전원켜기 만족, 잡아주는 힘 불만족

알리 k4 쿨러라고 치면 나옵니다. 10w제품으로 앞선 제품보다 쿨링성능이 훨 뛰어나며 뒤에있는 온도계로 확인했을 때 7도까지 떨어지는 것을 확인 했고 실제만져보면 뒷면 뿐만 아니라 디스플레이도 차갑습니다. 폰을 잡아주는 아구도 튼튼하고 1/4나사도 튼튼합니다. 다만 자동실행이 아니고 전원이 들어오면 ready상태이며 전원버튼을 2초간 눌러주어야 합니다.
LED도 나오기에 나중에 단선작업 or 내용물만 적출하여 새로운 케이스를 만들어볼까 합니다.
쿨링성능 만족, 소음 대만족, led 불만족, 전원켜기 불만족, 잡아주는 힘 만족

led 없음, 자동실행, 후기엔 살짝소음, 쿨링성능 위와같음
결국 이 제품까지 구매했습니다. LED없고 성능은 위와 같습니다.
삽질 4
곡선주행이 애매함

이런식으로 꺾고 돌아오고 꺾고 돌아오기를 반복
value.py 파일을 보면
STEER_MAX = 300 # GM limit is 3Nm. Used by carcontroller to generate LKA output
STEER_STEP = 3 # Active control frames per command (~33hz)
STEER_DELTA_UP = 10# Delta rates require review due to observed EPS weakness
STEER_DELTA_DOWN = 20
이런 옵션들이 있는데
step은 can통신 송신주기 hz이고
delta_up은 한번 송신에 핸들을 감을수 있는 양이고
delta_down은 한번 송신에 핸들을 풀 수 있는 양 입니다.
현재의 계산대로라면
33hz에 up 10이기 때문에 1초면 핸들 0부터 최대로 감은 300까지 1초안에 할 수 있는 건데요
이렇게 되면 짧은 시간 동안 감는 양이 너무 많아지는것이고
저의 경우
step 4 up 8 down 15로 셋팅을 해놨는데 이러면 핸들을 최대로 감는데 1.5초가 걸리고 푸는데는 0.8초가 걸리네요
푸는게 더 높은 이유는 아직 모릅니다. 다들 그렇게 셋팅이 되어 있고 up보다 낮게하면 에러가 뜬다는 분도 계시네요
여튼
수정을 하니 훨씬 좋게 곡선을 도는 것을 확인할 수 있었습니다.

수정 전

수정 후 1

수정 후 2
아직도 조절할게 남았지만 전보다는 훨씬 좋아졌습니다.
삽질 5
판다에서 나오는 usb c 케이블은 상시....
핸드폰이 상시로 충전이 되는 경험을 했습니다.
자체 기능에 전원차단이 있는데 안되는것같아요
알리에서
.

이제품이 데이터 전송이 가능한 usb3.2 gen2 자석 케이블이더라구요 될까안될까 고민할바엔 구매하고 후회하기로 하고 구매했는데 잘되네요 하지만 매번 빼주고 껴줘야되는 단점이...
남은삽질
1. 크루즈(롱컨트롤) 차간거리셋팅 (좀 더 좁게)
2. 크루즈(롱컨트롤) 가감속 셋팅 (좀 더 부드럽게)
--------------------------------------------------------------------------------------
23.10.22에 작성 된 글입니다.
현재는 크루즈도 잡았습니다. 이어서 업로드 하겠습니다.
'Openpilot' 카테고리의 다른 글
| 트랙스 오픈파일럿 QnA 가이드 (0) | 2024.12.01 |
|---|---|
| 트랙스 사용 브런치 (0) | 2024.10.29 |
| 트랙스 크로스오버 오픈파일럿 장착기 (3) | 2024.10.29 |
| 오픈파일럿 ? (8) | 2024.10.29 |


